

Forschungsprojekt: LAFUM-RO
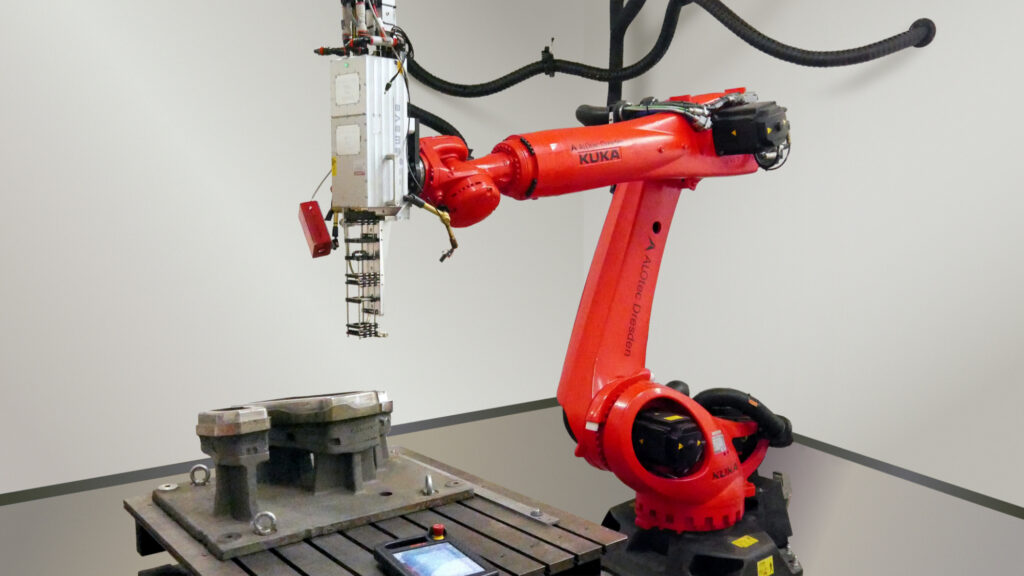
Das Gesamtziel des Projektes „Laserbasierte Funktionalisierung von Umformwerkzeugen mit Industrierobotern“ (LAFUM-RO) ist die Entwicklung eines Technologiekonzepts und Fertigungsverfahrens zur direkten, kosteneffizienten und adaptiven Herstellung funktionalisierten Oberflächen auf 3D-Umformwerkzeugen.
Die Herstellung solcher neuartigen 3D-Umformwerkzeuge mit funktionalisierten Oberflächen soll ein breites Anwendungsfeld, z.B. im Maschinenbau oder im Fahrzeugbau (bspw. beim Tiefziehen) unter wirtschaftlichen Bedingungen ermöglichen. Dabei sind die hohen technologischen Anforderungen z.B. der höhere Standzeiten der blechumformenden Industrie (verbesserte Tiefziehprozesse mit geringerer Stempelkraft, keine Bodenrisse im Produkt bei hoher Flexibilität der erzielten Blechformen) zu erfüllen, so dass ein neues Marktsegment für Laserpräzisionsbearbeitungsanlagen der ALOtec Dresden GmbH und der EdgeWave GmbH erschlossen werden kann.
Vom Weg zum Ergebnis
Forschungsprojekt LAFUM-RO
1. Einzelpulsablation
Um das Verhalten des Lasers zu untersuchen wurden einzelne Pulse herausgelassen und das Ablationsverhalten bei steigender Laserfluenz untersucht. Zu erkennen ist deutlich, dass die Größe des Ablationsbereiches mit steigender Fluenz zu nimmt.
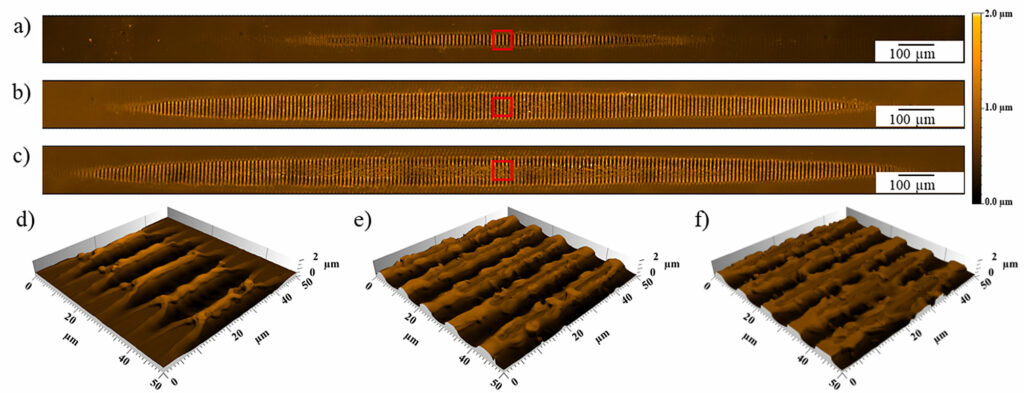
Konfokalmikroskopie Aufnahmen von DLIP strukturierten; (a, d): Φ = 2,6 J/cm²; (b, e): Φ = 4,7 J/cm²; (c, f): Φ = 5,6 J/cm².
2. Multipulsablation
Um eine vollflächige Strukturierung zu erzielen, wurden die Pulsfrequenz erhöht, sodass die einzelnen Pulse direkt aneinander liegen. Eine wichtige Größe zur Erfassung der Qualität ist der Homogenitätsfaktor H, welcher auf Basis des GINI Koeffizient ermittelt wird. Mit steigender Laserfluenz sinkt die Homogenität der Strukturen. Des Weiteren ist erkennbar, dass die Homogenität unabhängig von der Geschwindigkeit des Roboters ist.
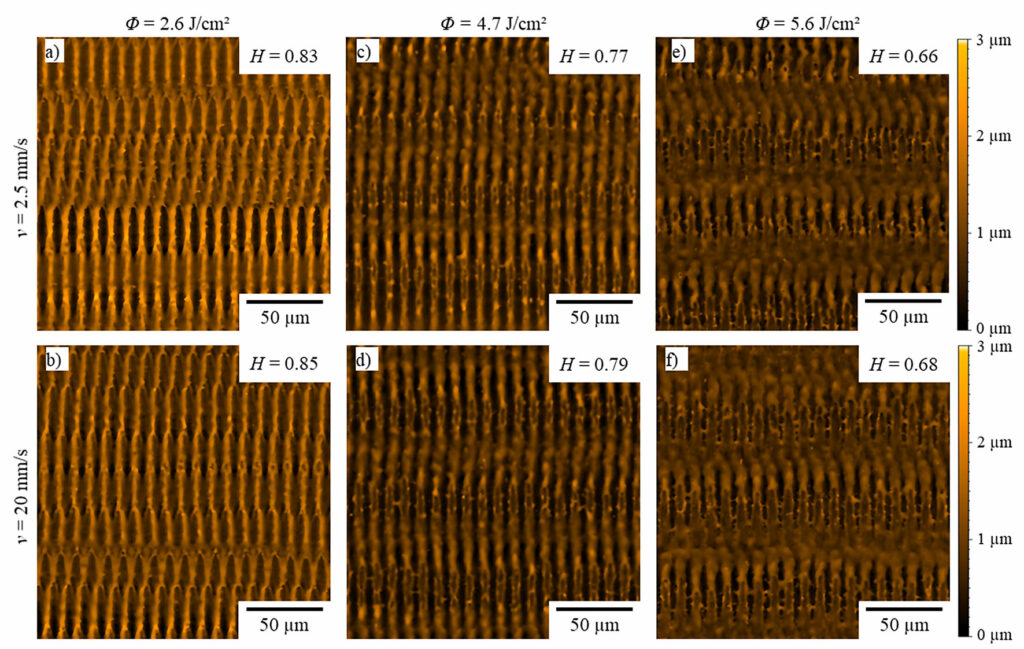
Konfokalmikroskopie Aufnahmen von DLIP Strukturen bei Geschwindigkeiten von v = 2,5 mm/s (a, c, e) and v = 20 mm/s (b, d, f) und einer Laserfluenz von Φ = 2,6 J/cm² (a, b); Φ = 4,7 J/cm² und Φ = 5,6 J/cm² (e, f).
3. Vergleich der DLIP Strukturen
Gegenüberstellung der Parameter und Ergebnisse von Strukturen die mittels einer Lineareinheit und eines Roboters hergestellt wurden.
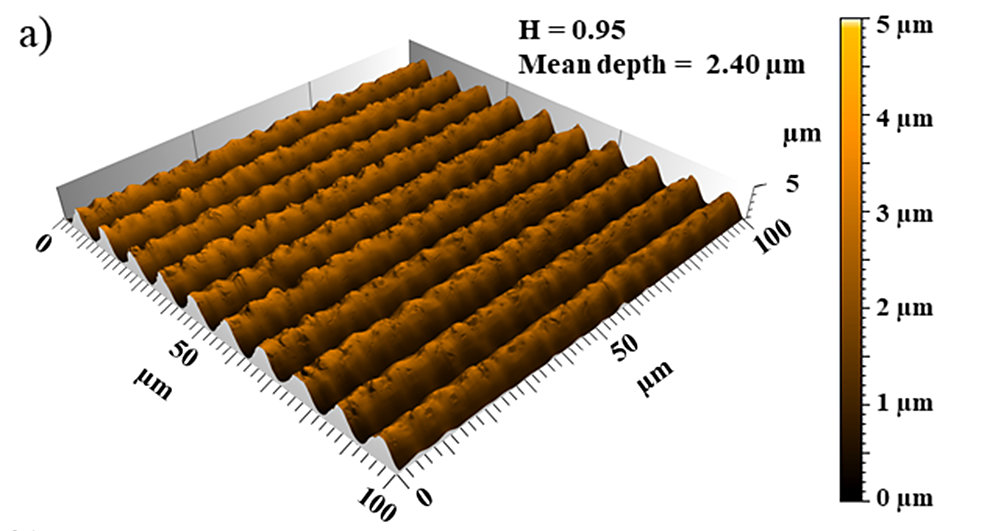
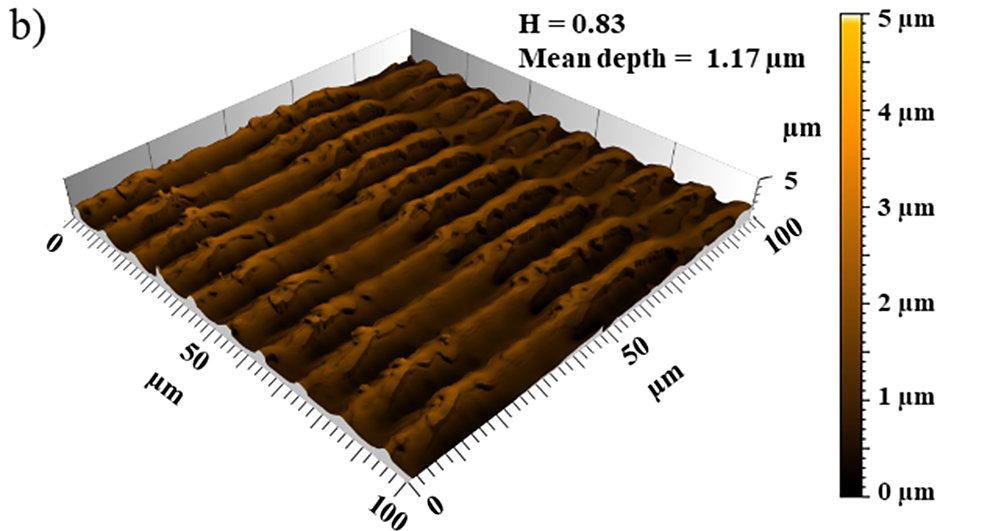
Konfokalmikroskopie Aufnahmen von DLIP Strukturen hergestellt mit einer Lineareinheit (a) und einem Roboter (b).
| Lineareinheit | Roboter | |
| Fluenz [J/cm²] | 2,5 | 2,5 |
| Frequenz [Hz] | 5000 | 100 |
| Geschwindigkeit [mm/s] | 100 | 2,5 |
| Überlapp [%] | 85 | 0 |
| Homogenität | 0.95 | 0.83 |
| Strukturtiefe [µm] | 2,4 | 1,2 |
| Flächenrate [mm²/s] | 125 | 3 |
| Freiheitsgrade | 2 | 6 |
Ziel erreicht! Mittels roboterbasierter DLIP Strukturierung können nun komplexe 3D Bauteile bearbeitet werden.
Projektpartner
ALOtec Dresden GmbH

Entwicklung einer Strategie für die zur Bearbeitung von 3D-Teilen mit einem Industrieroboter. Verbesserung der Langzeitstabilität der Mikrostrukturen durch Laserhärten.
EdgeWave GmbH

Entwicklung und Aufbau eines kompakten Lasersystems, das für die Interferenzstrukturierung optimiert ist.
TU Dresden

Optikentwicklung zum robotergestützen Oberflächenfunktionalisieren; Technologieentwicklung und Analyse der Materialeigenschaften
Förderung des Projektes
Das Projekt „Laserbasierte Funktionalisierung von Umformwerkzeugen mit Industrierobotern (LAFUM-RO)“ wird über das Zentrale Innovationsprogramm Mittelstand (ZIM) gefördert.
Förderkennzeichen: KK5279901SY1

Sie wollen mehr über unsere Forschung erfahren?
Reden wir.
Ob Anfragen zu unseren Forschungs- und Entwicklungsprojekten oder einfach nur Erfahrungsaustausch – wir freuen uns auf Ihr Interesse.
